CarRacing RL: PPO Expert → DAgger → Diffusion Augmentation
A CMU Deep RL project exploring expert training, dataset generation, imitation learning, and diffusion-based augmentation on Gymnasium CarRacing-v2.
assets/images/carracing_demo.gif).Links
Objective & Metrics
This project studies how to train a strong continuous-control policy in CarRacing-v2 and then distill/improve a student policy using imitation learning (DAgger) and diffusion-based synthetic data. The goal is improved robustness when the student deviates from expert trajectories.
Introduction
CarRacing-v2 is a continuous-control benchmark where an agent must drive a procedurally generated track from pixel observations. While a PPO expert can achieve strong performance, student policies trained via behavior cloning often fail under distribution shift: a small deviation from expert states can compound, sending the student into unseen states and causing crashes.
This project builds a full pipeline: (1) train an expert with PPO, (2) generate and validate an offline dataset, (3) train a student via imitation learning, (4) improve with DAgger, and (5) explore diffusion-based data/policy augmentation to increase coverage of critical recovery behaviors.
System Pipeline
- PPO expert: train expert policy and checkpoint best weights for safety.
- Dataset generation: collect rollouts in a consistent saved format (obs/actions/dones).
- Student training: behavior cloning / supervised imitation from expert dataset.
- DAgger loop: run student, query expert labels on visited states, aggregate dataset, retrain.
- Diffusion augmentation: generate synthetic trajectories/actions to expand coverage and improve robustness.
Methods
PPO Expert Training
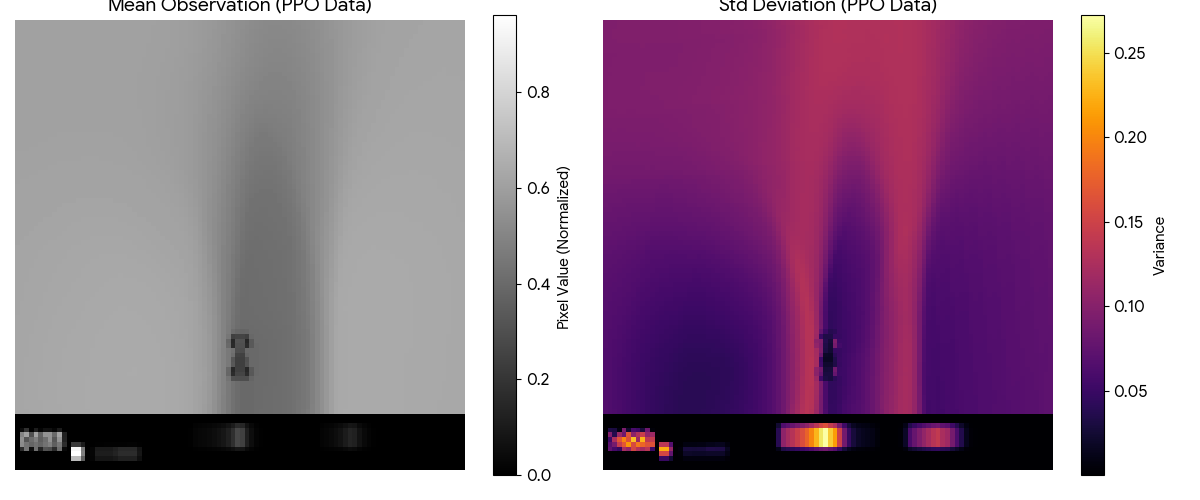
- Train PPO on CarRacing-v2 with image preprocessing (grayscale/resize/framestack as needed).
- Track reward curves and evaluation return; save
best.ptperiodically for crash safety. - Export rollouts with consistent observation resolution to avoid dimension mismatch downstream.
Offline Dataset Format
- Store observations (images), actions (continuous), and terminals.
- Include metadata: preprocessing, frame stack, action scaling, and environment version.
- Validate dataset with a lightweight “dataset_check” script to ensure shape/normalization consistency.
DAgger (Dataset Aggregation)
- Run the student policy on-policy to collect the states it actually visits.
- Label those states with expert actions (online query) and append them to the aggregated dataset.
- Retrain student on the combined dataset to reduce compounding error and improve recovery behavior.
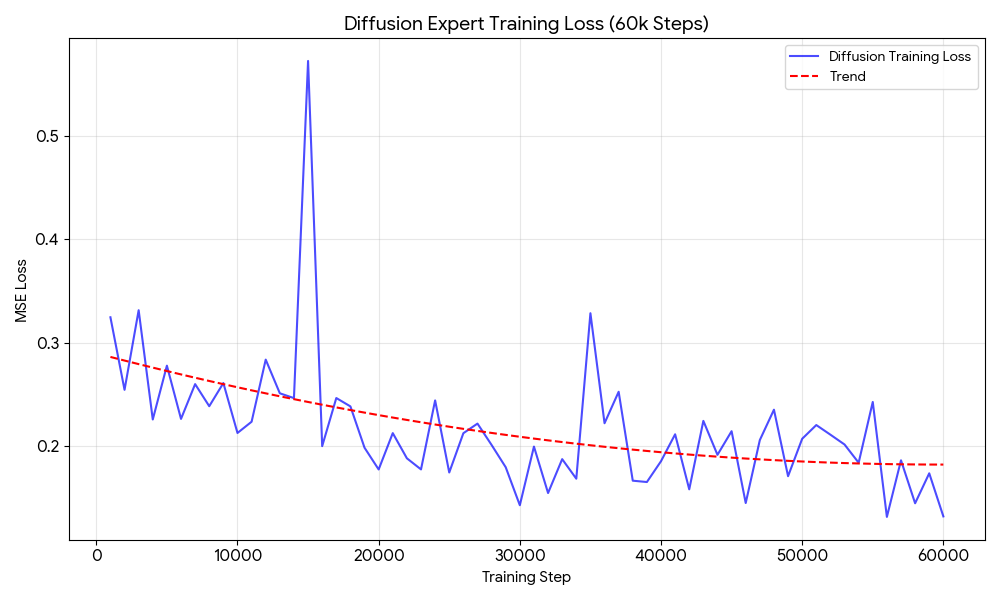
Diffusion-Based Augmentation
- Train a diffusion model over trajectories/actions (or latent representations).
- Sample synthetic data to increase coverage of rare but important failure-recovery regimes.
- Use the augmented dataset to train a student policy that generalizes better under distribution shift.
Results
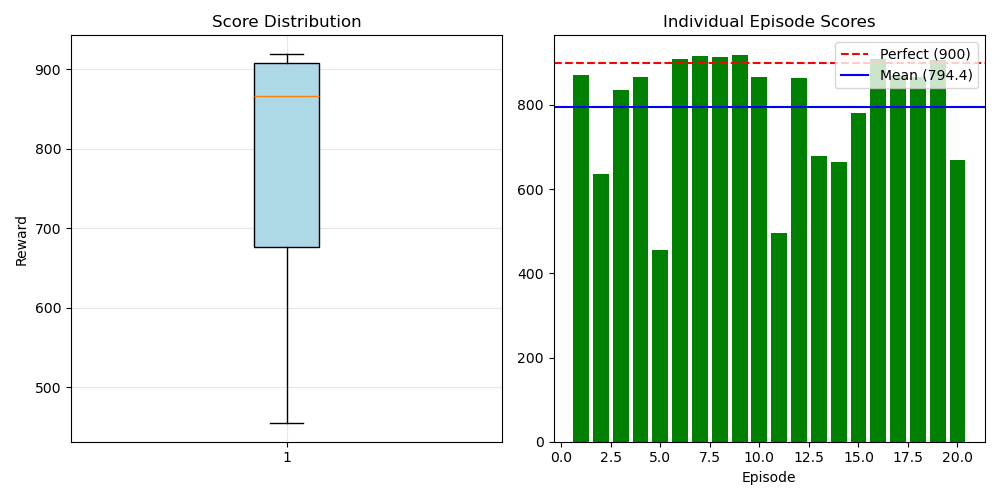
- PPO expert: average return over N evaluation episodes; best checkpoint return.
- BC student: performance drop vs expert; typical failure modes.
- DAgger: improvement vs BC after k iterations; recovery rate improvement.
- Diffusion augmentation: impact on robustness and variance (if implemented).
Discussion
A PPO expert provides high-quality supervision, but naive distillation can fail when the student drifts into unseen states. DAgger directly addresses this by re-labeling the student’s on-policy distribution with expert actions. Diffusion-based augmentation is explored as a complementary approach to increase dataset coverage and model complex action distributions for difficult recovery behaviors.
Key practical lessons include enforcing a single observation preprocessing pipeline across expert/student/diffusion, saving best checkpoints frequently for stability, and implementing dataset validation tools to catch shape mismatches early.
My Contribution
- Implemented PPO training/evaluation scripts and checkpointing strategy.
- Designed a consistent dataset export format for expert rollouts.
- Implemented and debugged DAgger training loop and dataset aggregation.
- Integrated diffusion data generation (or scaffolding) and ensured shape compatibility with student training.
- Built this project webpage and organized artifacts for the portfolio.